A Comprehensive Study of the Effect of Spatial Resolution and Color of Digital Images on Vehicle Classification
Aim: To provide an answer for the question: what are the best values for these two properties (spatial resolution and color) of digital cameras to use in vision-based vehicle classification systems? In other words, how many pixels are sufficient to build an accurate vision-based vehicle classification system?
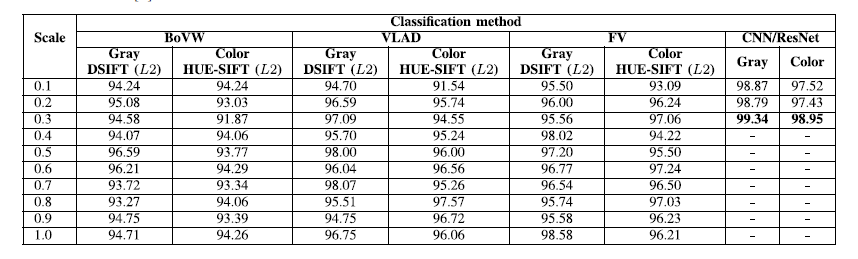
Aim: To study the effect of spatial resolution on the accuracy and performance of image classification methods.
Proposed System: present a comprehensive study of the effect of these two spatial characteristics (Dimension and color) of digital images on the vision-based vehicle classification process in terms of accuracy and performance.
For Bag-of-Visual Words (BoVW) [13], Vector of Locally Aggregated Descriptors (VLAD) [14] and Fisher Vector (FV) [15] it is recommended to use the DSIFT descriptor.
The ResNet/Convolutional Neural Network (CNN), architecture is considered the top classification method with an accuracy rate of 95.12% compare to BoVW, VLAD and FV methods.
Existing System:
1. The existing vehicle classification methods can be grouped into two main categories: (1) hardware-based and (2) vision-based methods.
2. SIFT, RGB-SIFT, CSIFT, HSV-SIFT, hue-SIFT, opponent-SIFT, rgSIFT, opponent-histogram, hue-histogram, and RGB-histogram in most cases.
Hardware-based Method: techniques developed using specific hardware components rather than, or in addition to, cameras. A range sensor was used in [6] to obtain vehicle features (i.e., length, width, height, and speed). The classification was performed using a feed forward neural network.
Vision-based Method: vision-based classification techniques were presented relying only on a digital camera without the need for any extra hardware components the accuracy of existing vision-based methods is considered extremely high. This category of vehicle classification methods is considered the most efficient way to classify vehicles without the need for extra hardware equipment besides digital cameras.
Feature-Based Methods: Feature-based methods deal with extracting visual handcrafted features from the vehicles’ images using local or global feature representation.
Scale Invariant Feature Transform (SIFT) features [24], Principal Component Analysis (PCA) [25], Gabor and log-Gabor filters [26], [27], Haar-like features [28], [29], HOG and Pyramid Histogram of Oriented Gradients (PHOG) [30], [31].
The DSIFT descriptor can be considered as the best descriptor for the BoVW, VLAD, and FV methods, as it achieves better results than other descriptors for most cases.
Requirements: Matlab, the BITVehicle [4] and LabelMe [5] datasets.
For additional details comment below with requirements.
For additional details comment below with requirements.


Comments
Post a Comment